Pentarm Static
Background
The ME 2110 class at Georgia Tech has something of a reputation among current and past ME students. The class, in which we are tasked with building an autonomous robot in a team, and then have those robots compete against each other, is notorious for having an immense time commitment, as teams spend days upon days in the machine shop designing, building, and testing.
In Spring 2022, I participated in this rite of passage, building a robot with two other teammates. In this page, I detail the decisions that went into the design of our robot, named the Pentarm Static.
Competition Overview
Every semester, the design competition takes the format of a 40 second 4 vs. 4 robot match, in which the competitors attempt to score as many points as possible, by completing various objectives.
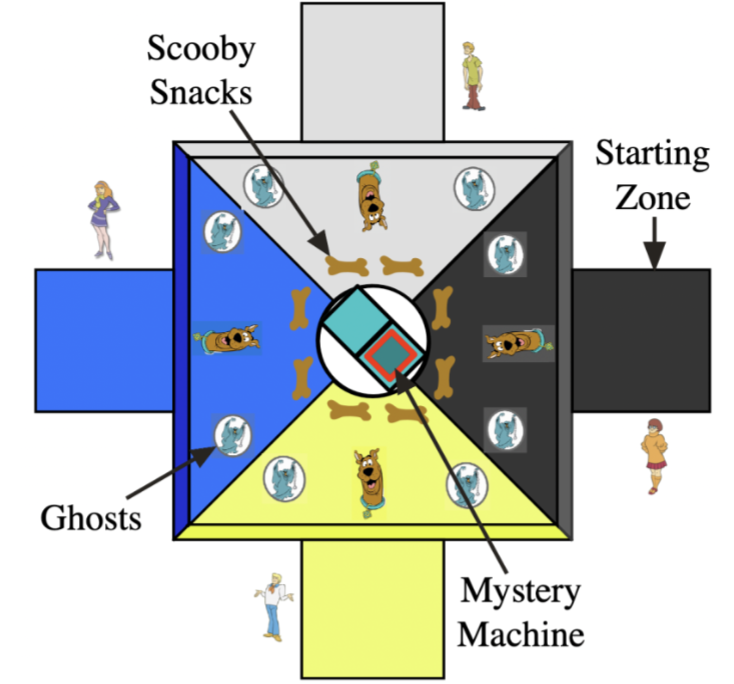
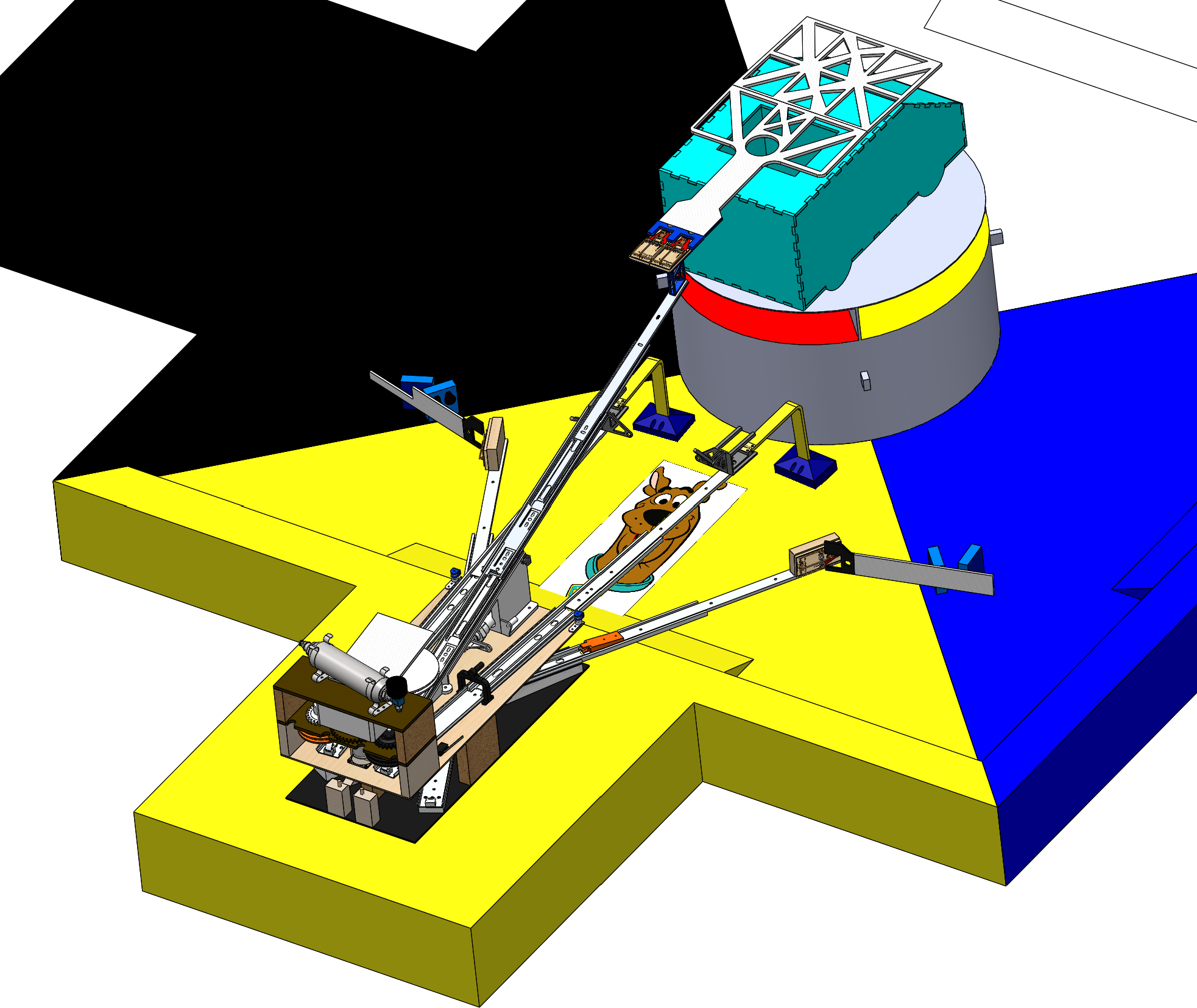
The Spring 2022 competition, themed around Scooby-Doo, had the following objectives:
- Chase away ghosts: Near each boundary between zones are 2 kitchen sponges, or "ghosts," approximately in the location of the "Ghost" object in the diagram. At the end of the match, teams lose 1 point for each sponge in their zone, incentivizing them to knock the sponges into other teams' zones.
- Feed Scooby his snacks: Each zone starts out with 2 bone-shaped dog toys, placed where the "Scooby Snacks" are in the diagram. The goal is to move the snacks towards the Scooby decal, with 1 point awarded for each snack moved off of the starting position, 2 points for each snack placed over the Scooby decal, and 4 points for each snack placed over Scooby's mouth on the decal.
- Leave in the Mystery Machine: Each robot is preloaded with an approximately 6-in tall 3D printed model of one of the human characters. The goal is to place the character into the rotating center console with the off-center hole, with 1 point for moving the character outside of the starting zone, 5 points for moving it over or on the center console, and 10 points for placing it inside the hole in the center console.
Every team is supplied with a mechatronics kit, consisting of 2 DC motors, 2 pneumatic pistons, 2 solenoids, 5 mousetraps, and some sensors. These are the only electronics permitted to be used on the robot.
Robot Design
Drivetrain
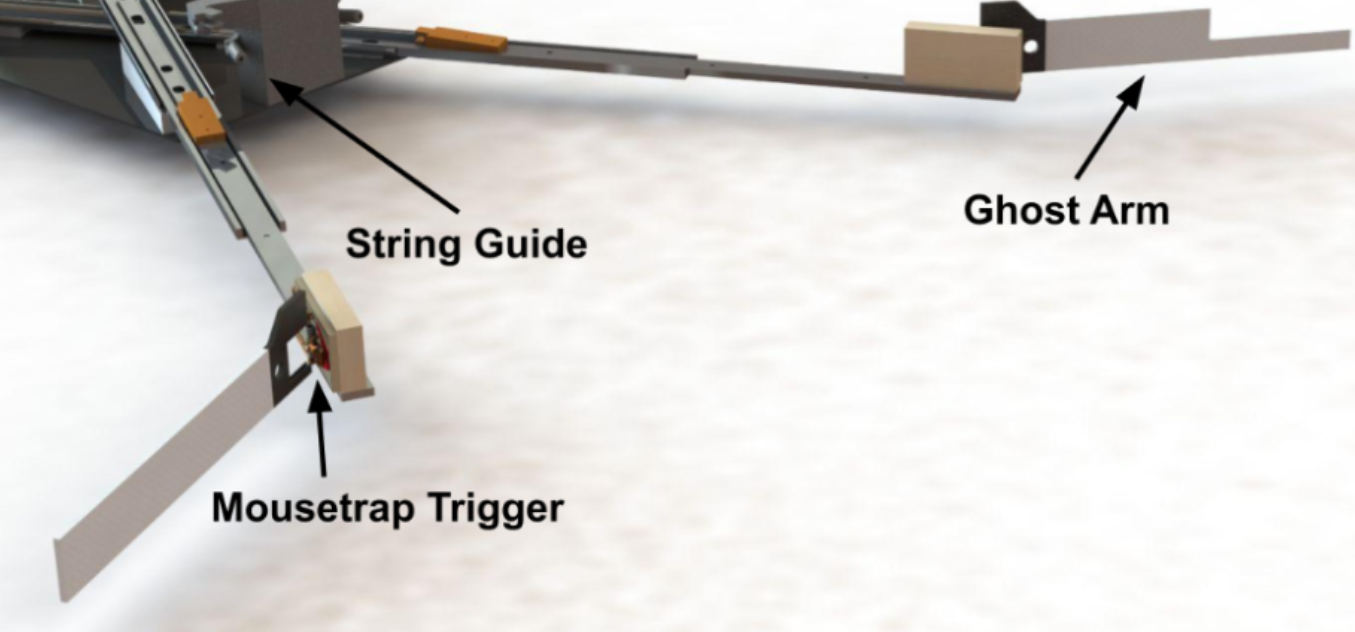
Ghost Chaser Mechanism
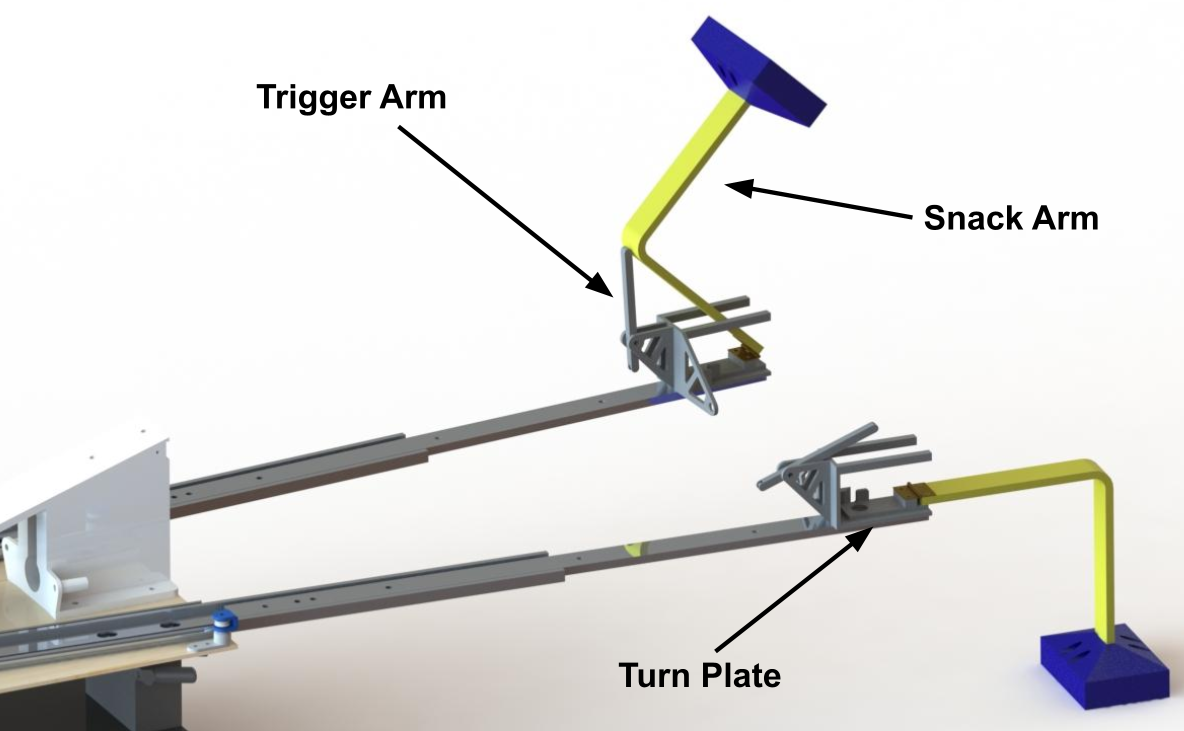
Scooby Snacks Mechanism
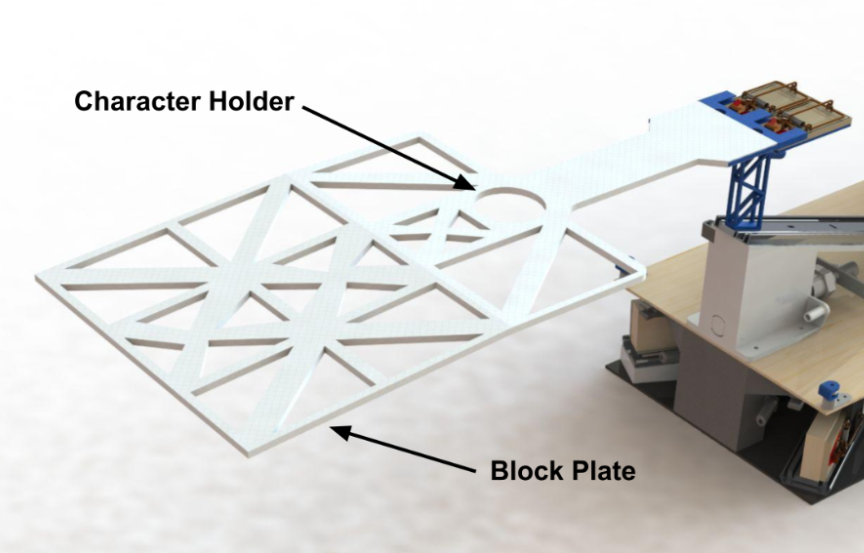
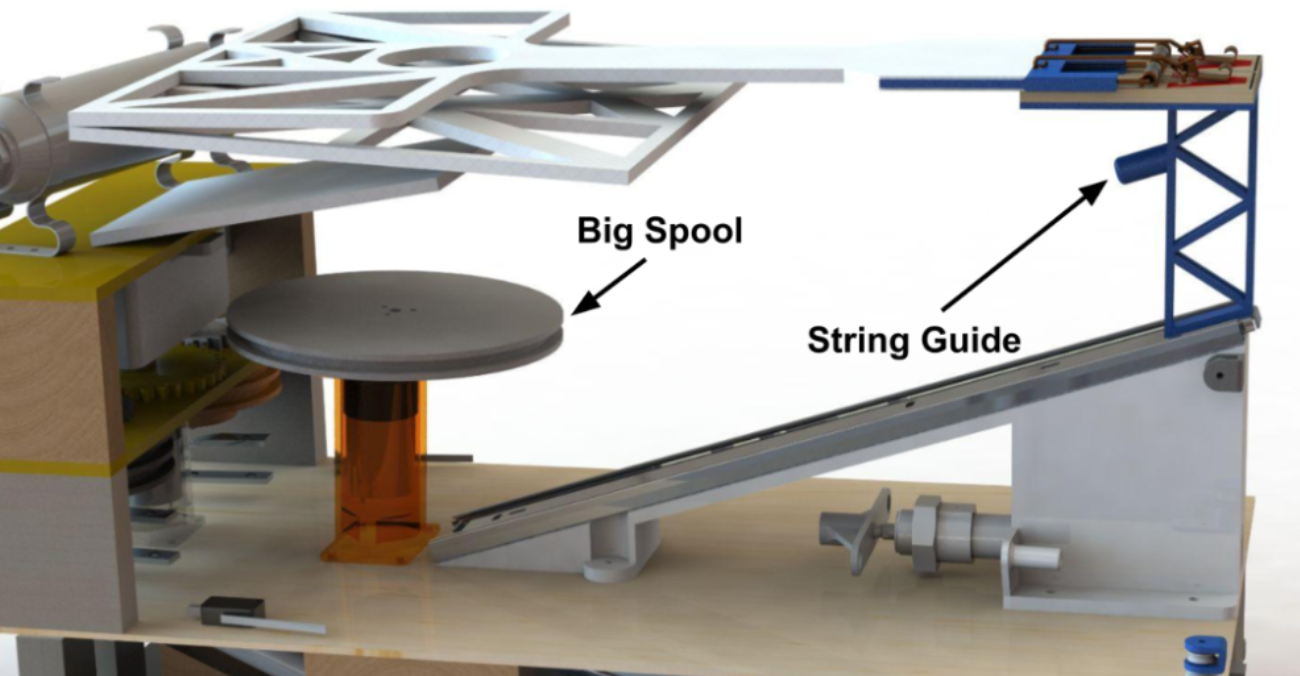
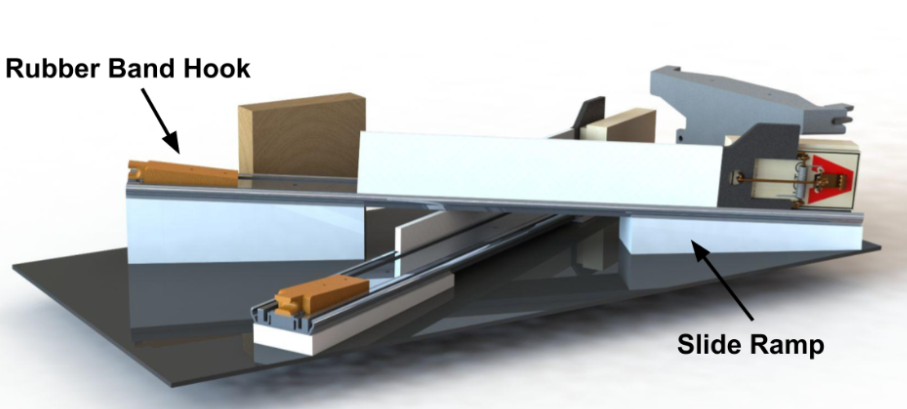
Character Mechanism