Agobot
Background
The FIRST Tech Challenge (FTC) is a high school robotics competition in which student teams construct robots that compete against others on a 12' x 12' playing field, completing various objectives to score points. These tasks range from those the robot has to perform on its own, to those where drivers can control the robot.
I competed on team 9866, Virus, for five years (2015-2020), mainly as a programmer, but I also contributed occasionally to the mechanical design.
This page covers my contributions to the robot we made in my senior year of high school (2019-2020), named Agobot.
2019-2020 FTC Challenge: Skystone
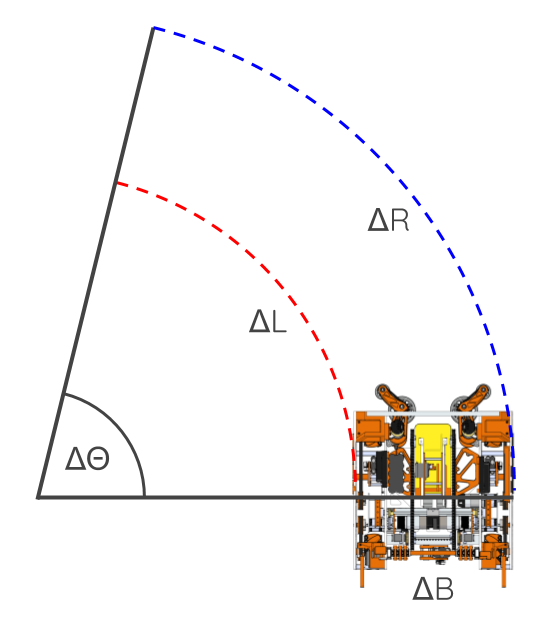
Odometry
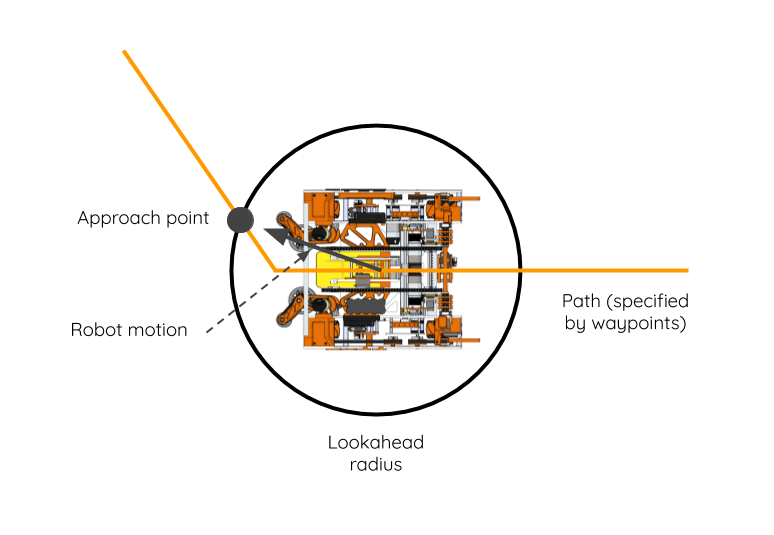
Pure Pursuit